Ke hoʻohana ʻia ka robot Yaskawa ma ke ʻano maʻamau, hōʻike ka hōʻike pendant aʻo i kekahi manawa i kahi memo e ʻōlelo ana "ʻAʻole i hoʻonohonoho ʻia ka ʻike hoʻonohonoho pono." He aha ke ʻano o kēia?
Manaʻo Manaʻo: Pili kēia alakaʻi i ka hapa nui o nā lopako, akā ʻaʻole pili i kekahi mau hiʻohiʻona 4-axis.
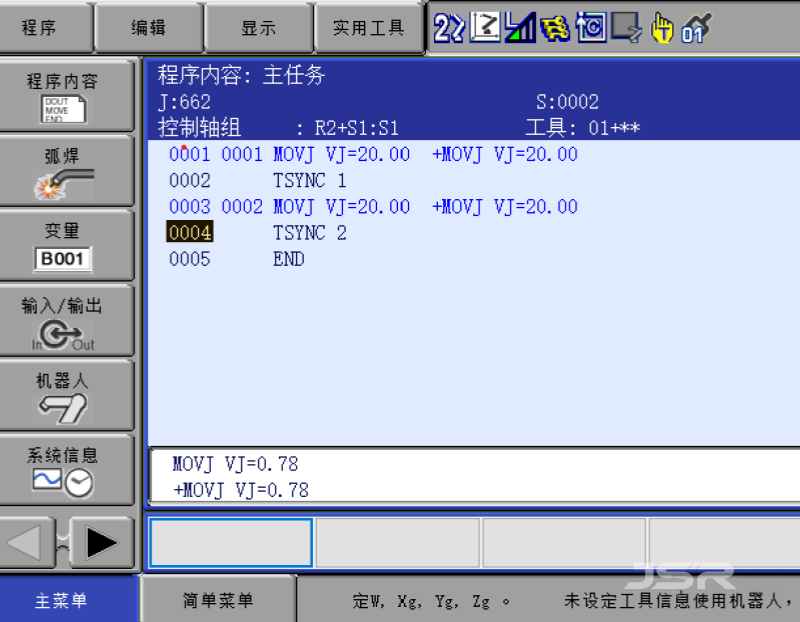
Hōʻike ʻia ka memo kikoʻī ma ke kiʻi kiʻi pendant aʻo ma lalo nei: Ke hoʻohana ʻana i ka robot me ka ʻole o ka hoʻonohonoho ʻana i ka ʻike hāmeʻa hiki ke hana hewa. E ʻoluʻolu e hoʻonoho iā W, Xg, Yg, a me Zg i ka waihona mea hana.
Inā ʻike ʻia kēia memo, ʻoi aku ka maikaʻi o ka hoʻokomo ʻana i ke kaumaha kūpono, ke kikowaena o ka ʻumekaumaha, ka manawa o ka inertia, a me nā ʻike ʻē aʻe i loko o ka faila mea hana. E kōkua kēia i ka robot e hoʻololi i ka ukana a hoʻonui i ka wikiwiki.
'Ōlelo Aʻo: Inā pono, hiki iā ʻoe ke hoʻonohonoho i nā hoʻonohonoho hāmeʻa.
Ma JSR Automation, ʻaʻole mākou e hāʻawi wale aku i nā ʻōnaehana robot Yaskawa akā hāʻawi pū kekahi i ke kākoʻo ʻenehana loea a me ka hana maʻamau - e hōʻoia i ka holo pono o kēlā me kēia ʻōnaehana i kāu hana.
Ka manawa hoʻouna: ʻAukake-16-2025
